

2022年12月30日
チューリッヒに来てちょうど半年が経とうとしています。今月のチューリッヒはクリスマス一色で、街中でクリスマスマーケットやクリスマスツリーが設けられていました。ラボからの帰りも、たまに誘い合ってクリスマスマーケットで食事をしてから帰るなど、クリスマス気分を満喫できました。
 10月末に京都で開かれたロボットの国際学会「IROS2022」に参加してきました。今年3月に提出していた、東大の修士で行った研究に関する論文が査読を通り、発表することができました。大まかに説明すると、ロボットへの動作指令(姿勢をどう変えるか)とカメラ画像内でのロボットの動きの関係を観察することで、身体構造についての事前知識がなくても自律的に身体の動かし方を獲得していくことができる、DIJE (Dense Image Jacobian Estimation)という研究です。人間がゲームを操作するような際に、最初はちょこちょこ動かして動作指令とキャラクターの動きの関係を学んでいく様子に似ています。
10月末に京都で開かれたロボットの国際学会「IROS2022」に参加してきました。今年3月に提出していた、東大の修士で行った研究に関する論文が査読を通り、発表することができました。大まかに説明すると、ロボットへの動作指令(姿勢をどう変えるか)とカメラ画像内でのロボットの動きの関係を観察することで、身体構造についての事前知識がなくても自律的に身体の動かし方を獲得していくことができる、DIJE (Dense Image Jacobian Estimation)という研究です。人間がゲームを操作するような際に、最初はちょこちょこ動かして動作指令とキャラクターの動きの関係を学んでいく様子に似ています。
さて、IROS2022は2020年以降初めて現地開催される大規模なロボット系の国際学会で、久しぶりに対面による研究者同士の議論が可能となりました。また、チューリッヒ工科大学で所属している研究室からも多くの論文が投稿され、計8人ほどで日本に向かいました。
日本を訪れることをとても楽しみにしているメンバーも多く、学会の日程の前後の滞在日程を伸ばし、京都だけでなく大阪や奈良、さらに新幹線に乗って東京も巡るなど、それぞれが日本を満喫しているようでなによりでした。特に食についての満足度は高く、こんなに美味しい食事が手頃に食べれることに感動した、と何度も言われ、自分まで嬉しくなりました。私は今年の6月末にスイスでの生活を始めたばかりのため、久しぶりの日本、というわけでもなかったのですが、それでも家族や友人と再会でき、楽しい時間をすごすことができました。スイスからの場合、接種証明があれば日本入国時の検査も不要となり本当に気軽に入国できたので、本格的に海外との往来が戻ってきたな、と実感しました。
今回の学会で色々な発表を見たり、研究者と話をしている中で見えてきたのは、ロボット分野にも機械学習技術の導入の流れが本格的に来ている、ということです。今年は国内国際情勢ともに色々なことがあった年ですが、それら以外で今年を象徴する出来事と言えば、AI技術の発展により、「誰でも」人間が作ったものと区別できないレベルの絵や文章が生成できるようになったことだと思います。今年7月にはDALL-E 2という画像生成AIが、そしてつい先月はChatGPTという会話botが公開されました。どちらもOpenAIという研究機関のウェブサイト上ですぐに無料で試せるので、まだ自分で試していない方はぜひちょっと遊んでみることをおすすめします。それらで私が生成してみた文書や絵をこちらに載せますが、人間が作ったと言われても信じてしまうクオリティだと感じていただけると思います。質が高いだけでなく、人間が描(書)くよりもはるかに短時間で、しかも誰でも生成できるようになってきているということは、来年からAIによる生成物があちこちで活用され始めるはずです。スパム、フェイク記事、願書や論文などの代筆など、色々な問題が起きるでしょう。しかし、これらの技術により新しいアイデアが可能になったり、仕事によっては一部をAIに肩代わりさせ、余裕が生まれることでしょう。私もプログラミングする際にAIによる予測変換のようなもの(GitHub Copilot)を導入していますが、あまりに便利すぎて今となってはこれ無しではプログラムが書けないほどです。
このようなAI技術はロボットにはどう応用できるのでしょう。ロボットでは、運動方程式のようにロボットの動きを表すモデル(数式)をたて、それらを物理的・数学的に処理することにより制御を行う「モデルベース制御」と、強化学習などの学習手法にそれを任せてしまう「学習ベース制御」と大きく二つの制御方法があります。市販のロボットアームなどはほぼ全てモデルベース制御で動いており、モデルを作ることができれば確実に動かすことができます。今後も、基本はモデルベース制御の方が安定して動作するロボットを作ることができるだろう…と去年までは思っていました。しかしロボット分野でも歩行や手で物体を操る器用な動作が、学習手法によりモデルベースのような従来の手法では実現できなかったような動きまでやすやすと達成してきている現在、ロボットにもAI化の流れが来ていることを無視することができなくなってきています。GPUという高速並列処理が可能な計算機の普及、GPU上で動作する物理エンジンの登場、効率的な強化学習手法の発展により、従来は数日かかっていたような学習も数分、数時間で完了するようになってきました。私もチューリッヒに到着して以来、少しずつその分野について勉強していき、自分の研究にも導入していっています。時代の潮流にうまく乗り、飲み込まれないように気を付けつつ自分の研究を進めていきたいと思っています。
□ IPv6だとSoftEther/SSTPでVPNを経由して接続してくれなかった問題への対処
IPv6だとSoftEther/SSTPでVPNを経由して接続してくれなかった問題への対処
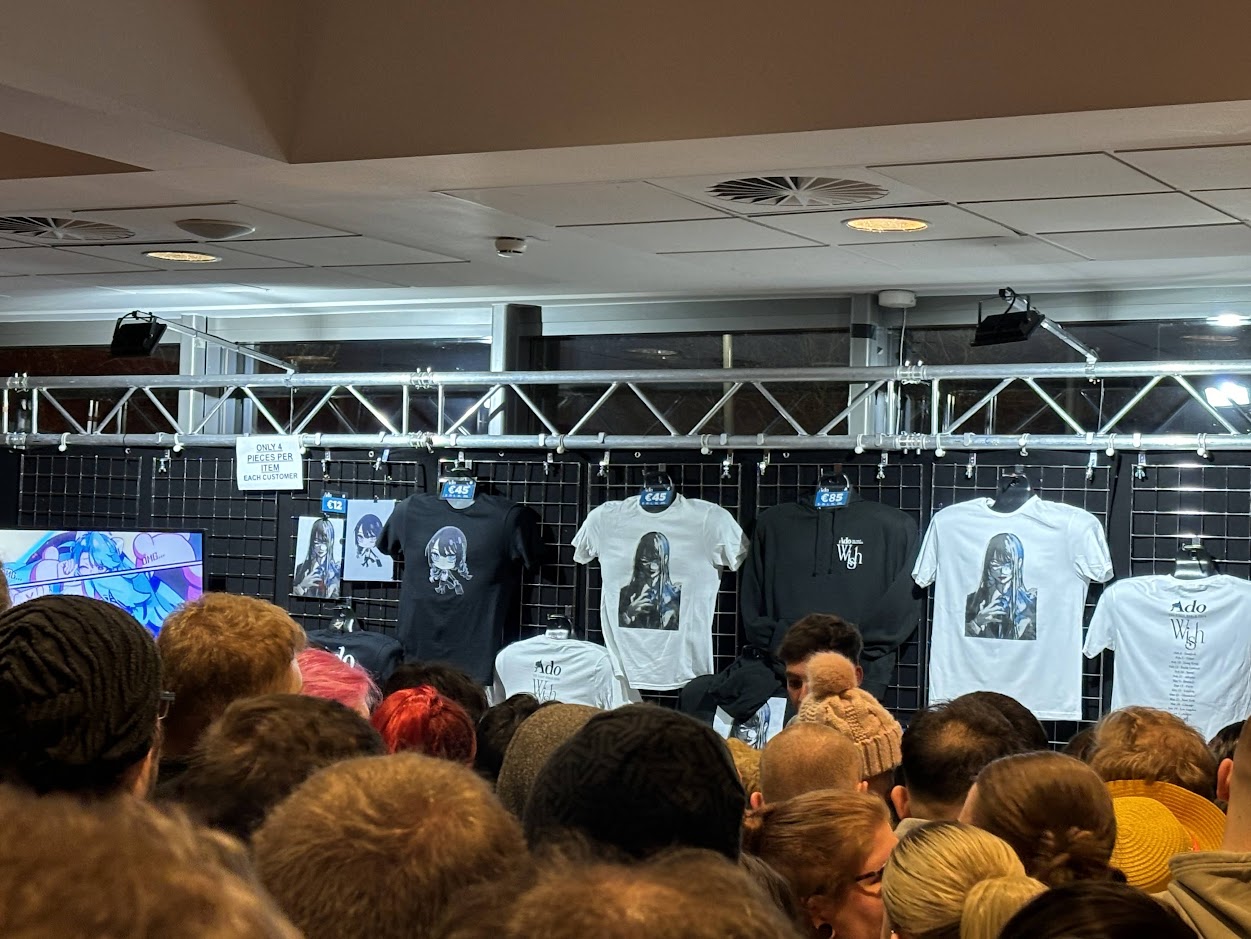 【ライブレポート】Ado 世界ツアー「Wish」ヨーロッパ最終公演(ドイツ・デュッセルドルフ)に行ってきた
【ライブレポート】Ado 世界ツアー「Wish」ヨーロッパ最終公演(ドイツ・デュッセルドルフ)に行ってきた
 日本の未来は明るい、気がする
日本の未来は明るい、気がする
 進撃の巨人のモデルの街、ネルトリンゲン
進撃の巨人のモデルの街、ネルトリンゲン